

2025-08-13
网心OEC和OEC-T刷机教程
拆掉四颗螺丝 正面朝上 拆掉所有螺丝 打开排线卡扣去除sata排线 在电脑端先选好boot程序和system的固件,然后开始硬件短接。 短接部分 短接可以用一根导线接通任意gnd另一端不截个金属镊子或...
逆水行舟, 不进则退!
拆掉四颗螺丝 正面朝上 拆掉所有螺丝 打开排线卡扣去除sata排线 在电脑端先选好boot程序和system的固件,然后开始硬件短接。 短接部分 短接可以用一根导线接通任意gnd另一端不截个金属镊子或...
https://firmware-selector.openwrt.org/ 打开上面网址选择 Generic x86/64 版本, 定制openwrt时在后面增加: luci-i18n-base-z...
deb [ arch=armhf ] http://mirrors.aliyun.com/debian bookworm main contrib non-free-firmware deb http...
1.下载ffmpeg库的源代码 ( http://sourceforge.net/project/showfiles.php?group_id=205275&package_id=248632): [...
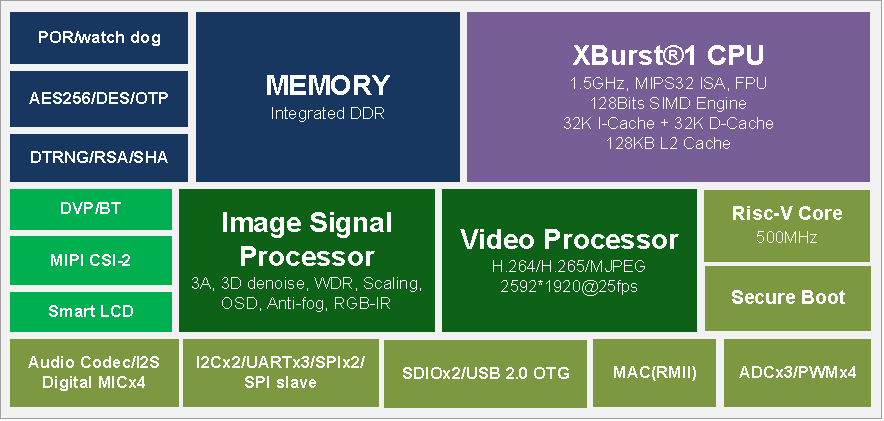
君正T31分为以下版本,T31正常(标准版,简称T31N),T31Lite(简,简称T31L),T31e X tra(增强版,T31X),T31AI(AI版,简称T31A),T31ZL,T31ZX。T...
driver load SNS_TYPE=imx335 mem_total=24 b_arg_online=”” vgs_frequency=1024 viu_frequenc...
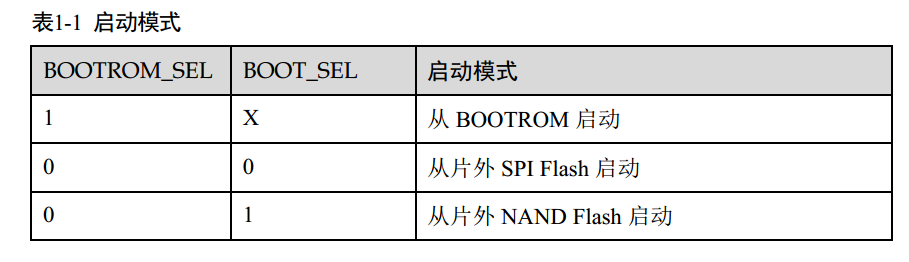
在烧写程序之前先看看,板子是什么启动模式是比较重要的。 一、启动模式 Hi3516A 支持以下三种启动方式: 从片外 NAND Flash 存储空间启动 从片外 SPI Flash 存储空间启动 从 ...
一、配置,编译,安装BUSYBOX 1.1 配置BUSYBOX ①进入busybox所在目录,指定配置文件 cd Hi3516A_SDK_V1进一步了解
首先生成mksquashfs工具,进入osdrv\tools\pc\squashfs4.3,make 生成mksquashfs,大约1.2M,制作squashfs命令: mksquashfs ${BA...
一:原材料 小系统组件的各个生成结果存放在 Hi3516EV200_SDK_V1.0.1.2/osdrv/pub/hi3516ev200_spi_image_uclibc/ 目录下,我们来看看都有什么...