

(1) SWD 仿真模式概念简述 先所说 SWD 和传统的调试方式有什么不一样:
首先给大家介绍下经验之谈: (一): SWD 模式比 JTAG 在高速模式下面更加可靠. 在大数据量的情况下面 JTAG 下载程序会 失败, 但是 SWD 发生的几率会小很多. 基本使用 JTAG 仿真模式的情况下是可以直接使用 SWD 模式的, 只要你的仿真器支 持. 所以推荐大家使用这个模式. (二): 在大家 GPIO 刚好缺一个的时候, 可以使用 SWD 仿真, 这种模式支持更少的引脚. (三): 在大家板子的体积有限的时候推荐使用 SWD 模式, 他需要的引脚少, 当然需要的 PCB 空间就小啦. 比如: 你可以选择一个很小的 2.54 间距的 5 芯端子做仿真接口.
(2) 仿真器对 SWD 模式支持情况 再说说市面上的常用仿真器对 SWD 仿真的支持情况.
(1) JLINKV6 支持 SWD 仿真模式. 速度较慢. (2) JLINKV7 比较好的支持 SWD 仿真模式, 速度有了明显的提高. 速度是 JLINKV6 的 6 倍. (3) JLINKV8 非常好的支持 SWD 仿真模式, 速度可以到 10M. (4) ULINK1 不支持 SWD 模式 (5) 盗版 ULINK2 非常好的支持 SWD 模式. 速度可以达到 10M. (6) 正版 ULINK2 非常好的支持 SWD 模式. 速度可以达到 10M.
再所说硬件上的不同: (1) JLINKV6 需要的硬件接口为: GND, RST, SWDIO, SWDCLK (2) JLINKV7 需要的硬件接口为: GND, RST, SWDIO, SWDCLK (3) JLINKV8 需要的硬件接口为: VCC, GND, RST, SWDIO, SWDCLK (4) ULINK1 不支持 SWD 模式 (5) 盗版 ULINK2 需要的硬件接口为: GND, RST, SWDIO, SWDCLK (6) 正版 ULINK2 需要的硬件接口为: GND, RST, SWDIO, SWDCLK 由此可以看到只有 JLINKV8 需要 5 个引脚. 那么给大家介绍下为什么有了 VCC 这个引脚时候有好处, 我的个人理解: 我认为有这个引脚是最合适的, 仿真器对目标板子的仿真需要用到 RST 引脚, 其实使用仿真器内部的 VCC 做这个功能其实并不是非常美妙. 因此 JLINKV8 选择了只和目标板共 GND, 但是不共 VCC. 因此我觉得这种模式最合理, 当然通常情况下仿真器和目标板共 GND 和 VCC 是没有错的.
下面两张演示就是我使用 JLINKV8 进行下载程序到 Mini-STM32 开发板上仿真的图片. 程序代码中使用 了 uCGUI , 一共程序代码 120K 左右. 使用 JLINKV8 下载到芯片中只需要 5 秒左右.




(3) 在 MDK 中SWD 模式设置
接下来告诉大家怎么使用 SWD 设置:
打开工程 Option 设置:
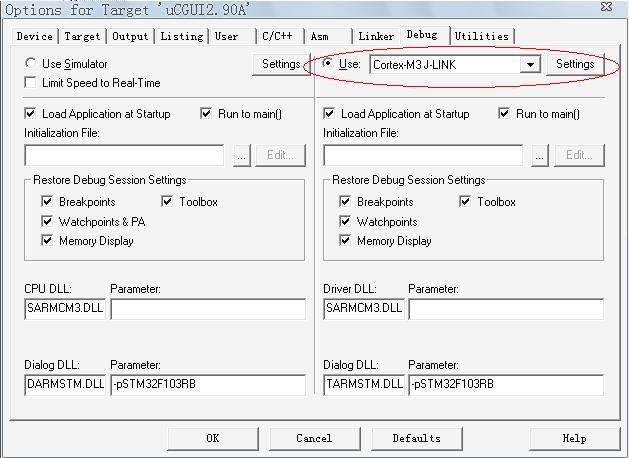
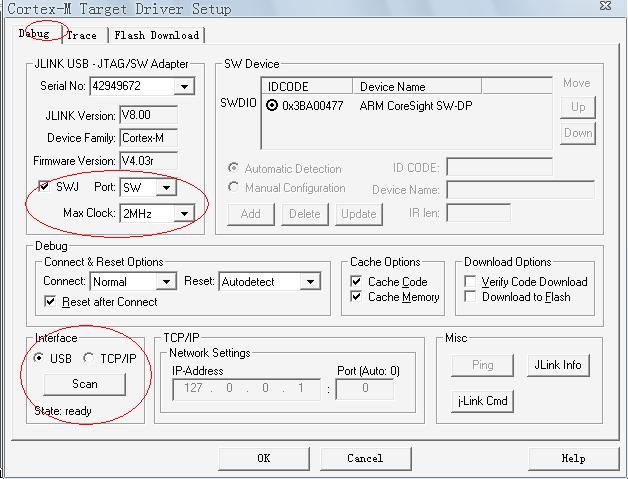
在设置中按照上图设置成 SWD 模式, 速度你可以按照你的实际需求来设置, 如果你的板子供电系统不是特别稳定, 纹波比较大或者仿真线比较长可以设置成 500K 或者 1M , 如果环境很好当然可以选择 10M , 当然速度会飞起来.
记得不要忽略了左下方的那个
USB
还是 TCP 模式, 当然我们是 USB 模式, 因为有的时候默认是 TCP 模式, 这个时候我们忽略这个设置后会仿真常常连接不上的.
注意: 上面这个界面是在仿真器插在电脑上才会出现的界面, 就是说没有实际插入仿真器的话不会出现这个界面的. 当然虽然上面是 JLINKV8, ULINK2 下的设置也是一样的.